Intra- and intersegmental neural network architectures determining rhythmic motor activity in insect locomotion
The coordinated movement of the extremities of an animal during locomotion is achieved by the interaction between groups of neurons called central pattern generators (CPGs). In the absence of any sensory input this network creates a stable rhythmic motor activity that is essential for a successful coordination between limbs. Studying the structure and the interaction between different parts of the CPG network is therefore of particular interest.
This work is motivated by recent experimental results reported by Mantziaris et al. (2017). By chemically activating both isolated and interconnected deafferented thoracic segments (ganglia) of the stick insect Mantziaris et al. (2017) analyzed the interactions between contralateral networks that drive the levator-depressor muscle pairs, which are responsible for the upward-downward movement of the legs. The results of the experimental analysis showed that intrasegmental phase relations differ between isolated segments. In particular, in isolated segments where the control networks of the middle and hind legs reside, i.e. in the meso- and metathoracic ganglia, the phase relations between activities of the contralateral depressor motoneurons were in-phase and anti-phase, respectively. Moreover, the phase relations switched to in-phase and stabilized when the ganglia were interconnected (Fig. 1).

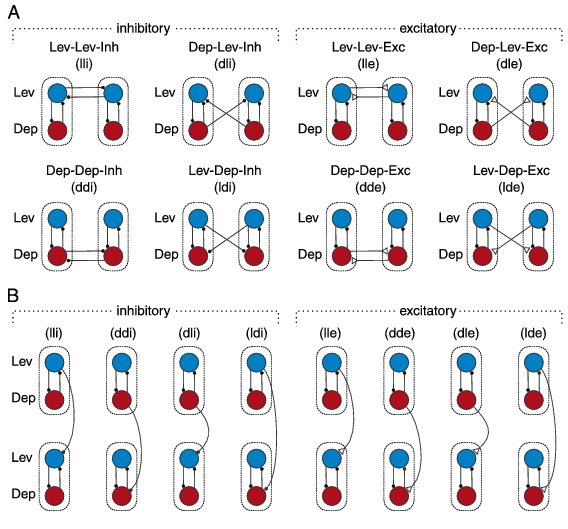
Using the phase reduction of an intersegmental network model of stick insect locomotion presented in our previous work (Yeldesbay et al. (2017)), we built a reduced model of the intra- and intersegmental network controlling levator-depressor activity in the meso- and metathoracic ganglia. By examining the intra- and intersegmental phase differences in the model we identified the properties of the network couplings that replicate the results observed in the experiments. We applied the theoretical analysis to escape type CPGs and revealed a set of possible contra- and ipsilateral synaptic connections. Finally, we defined general features of the couplings between CPGs of any type that maintain the phase relations observed in the experiments Fig. 2).
Publication:
Yeldesbay, A. & Daun, S. (2020). Intra- and intersegmental neural network architectures determining rhythmic motor activity in insect locomotion. Communications in Nonlinear Science and Numerical Simulation, 82, 105078