Intelligent Active Systems
Collective Motion of Cognitive Self-Steering Particles with Visual Perception
Group formation and collective motion in form of swarms or flocks is hallmark of living systems across many length scales. The behaviour often emerges without central control and is govern by the response of individuals to the action of other group members. Important features of such systems are active non-equilibrium behavior, non-reciprocal interactions, information processing, and self-steering.
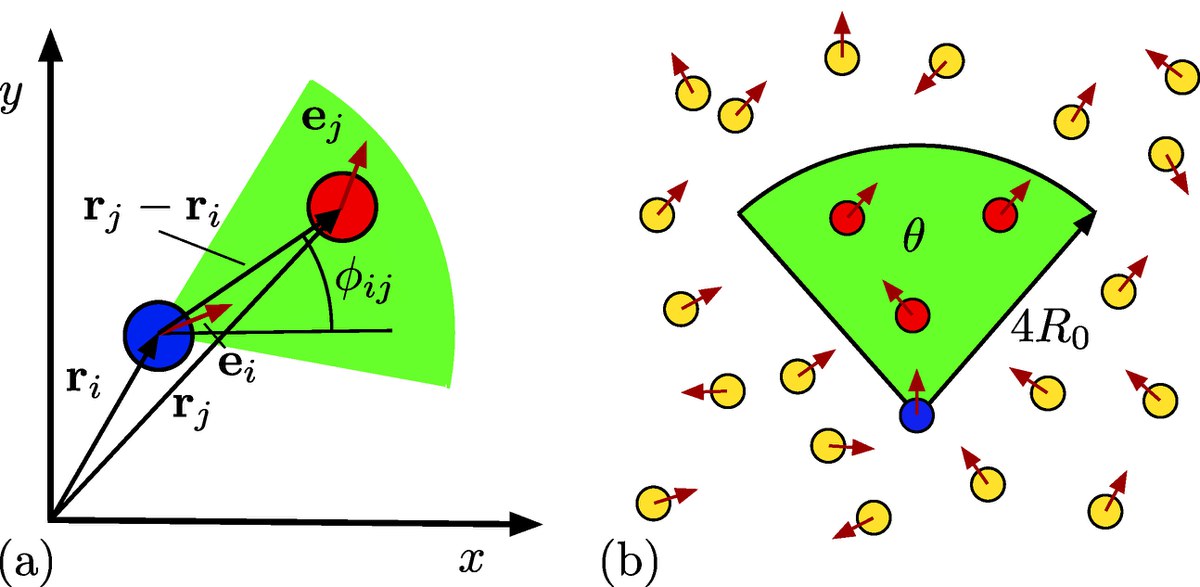
We study intelligent active Brownian particles (iABPS) which are capable of steering towards desired orientation based on visual information about the location of their peers. The dynamics of iABPs is governed by self-propulsion and an orientational response with limited maneuverability to the instantaneous visual signal about the positions of neighbours within the vision-cone.
We obtain several non-equilibrium structures like worms, worm-aggregate coexistence, aggregate and, dilute phase - depending on strength of reorientation response, vision angle, packing fraction, rotational diffusion, and activity. Our results help to understand the collective behavior of cognitive self-propelled particles, such as animal herds and micro-robotic swarms.
Reference: R. S. Negi, R. G. Winkler, and G. Gompper, Emergent collective behavior of active Brownian particles with visual perception. Soft Matter 18, 6167-6178 (2022);
DOI: 10.1039/D2SM00736C
Pursuit dynamics of intelligent active matter
Motility and cognitive self-steering are essential sources of pattern formation and collective dynamics in biological and artificial systems on scales from microbes, cells, and colloids, to microbots and animals. Interacting active particles and agents exhibit fascinating collective behaviors, ranging from the swarming of microorganisms, to the lane-formation of ants and the flocking of birds.
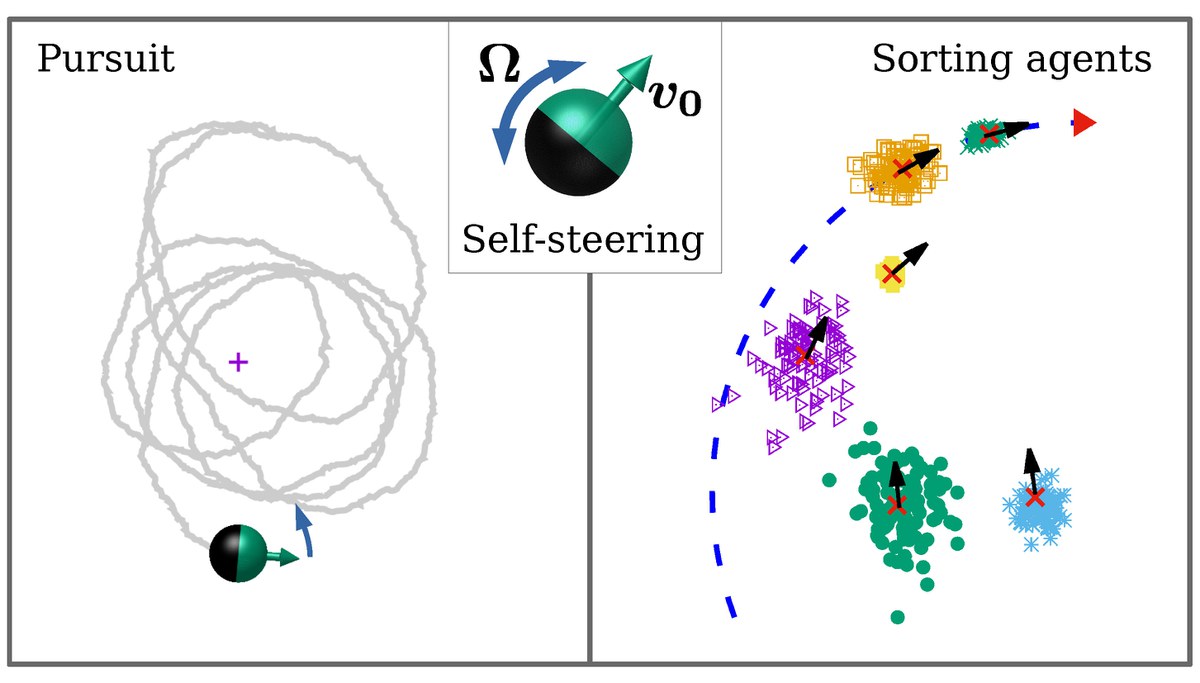
We aim to understand such information-based behaviours in active matter by modelling self-steering active agents with limited maneuverability. As an archetypical example, we investigate pursuit dynamics by self-steering active Brownian particles. Employing stationary and moving targets, we demonstrate that noise plays a dual role in pursuit. If noise is too strong, pursuers cannot self-propel efficiently in the target direction, thereby exhibiting a poor pursuit performance. However, without noise, pursuers perform quasi-elliptical orbits around the target, and pursuit also fails. The pursuit performance and resultant dynamic patterns – for which we predict a universal scaling behavior - depend on motility, maneuverability, and geometry of the target trajectory. Circular target trajectories can be utilized to sort active agents according to their dynamic properties.
Our study will help to understand non-equilibrium behaviour in living matter, e.g. the predator-prey dynamics of microorganisms; insight gained will also be useful in designing bioinspired robots with desired functions.
Reference: S. Goh, R. G. Winkler, and G. Gompper. Noisy pursuit and pattern formation of self-steering active particles. New J. Phys. 24 093039(2022);
DOI: 10.1088/1367-2630/ac924f